Learning of safety critical model predictive controllers for autonomous systems
- Project timeframe
- 1 May 2023 - 30 April 2026
- Research area
- Control Systems
- Amount awarded
- £400k
- Funder ID
- EPSRC
Project leader: Dr James Fleming
Advances in artificial intelligence (AI), robotics, and computer vision are making self-driving road vehicles, agile mobile robots, and other complex mobile autonomous systems a reality. This three-year project will develop methods to ensure that motion control of such systems can be carried out safely and reliably, guaranteeing that they avoid collisions in complex, changing environments. Working with our academic and industrial partners, we will test these new methods by developing novel, safe motion controllers for autonomous and stability-assisted motorcycles.
Our aim
Mobile robots and autonomous vehicles rely heavily on motion control techniques, such as following a desired path or moving to a specific location. Model Predictive Control (MPC) is a useful methodology, as it allows constraints to be specified to ensure that obstacles are avoided. The behaviour of MPC is well understood from years of theoretical development and industrial practice, providing strong safety assurances. However, considerable time, care and expert knowledge are required to implement it correctly in safety-critical applications.
Recently, the emergence of AI techniques such as deep reinforcement learning have allowed a new approach, where an AI agent can automatically learn how to control a robot or autonomous vehicle based on experience. But unlike a carefully designed MPC controller, it is currently impossible to guarantee that an AI agent will not cause a collision.
For the first time, this project will develop AI methods to automatically design MPC for safe motion control of autonomous systems while retaining strong safety assurances. The goal is to enable rapid design and prototyping of safe controllers, reducing development time and cost and improving the safety and reliability of future mobile robots and autonomous vehicles.
Our research
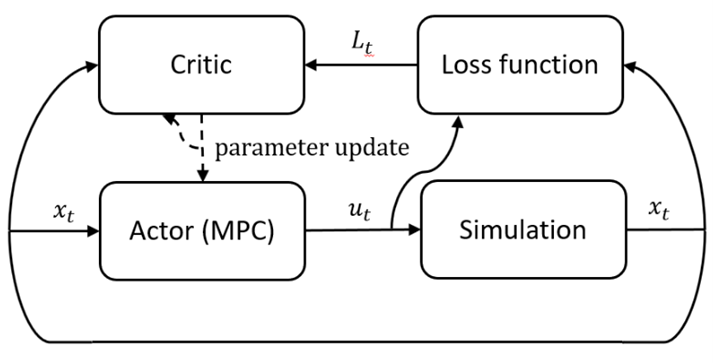
During the project, Loughborough researchers are developing theory and algorithms to automatically learn MPC-based motion controllers for autonomous vehicles, in which the controllers are trained using experience from simulated scenarios. These algorithms are based on recent mathematical advances showing that advanced optimisation-based controllers, such as MPC, can be differentiated with respect to their parameters and therefore trained in reinforcement learning frameworks. The key research question is whether this can be achieved while retaining safety guarantees; for instance, that the resulting motion controller does not cause avoidable collisions.
Challenges in the field
Data-driven modelling and control is a key research and innovation challenge within control and automation and is necessary to meet the demands of future systems that are more complex, must accommodate changing environments and operate autonomously.
Although they are data-driven and learn from experience, current reinforcement learning and AI methods rarely come with safety guarantees and have problems with predictability that make them unsuitable for applications like autonomous driving, where safety must be guaranteed.
Our outcomes
The project will develop techniques to automatically learn safe motion controllers, developing a combination of theoretical results and practical algorithms. The design techniques developed will be included in an open-source software library for academic and industrial researchers developing self-driving vehicles and other complex autonomous systems.
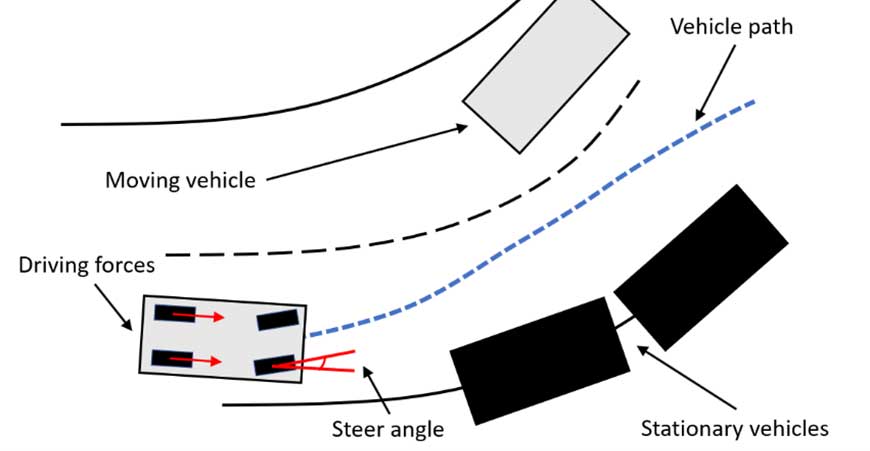
Successful implementation of motorcycle driving assistance has a significant potential impact on road safety, noting that motorcycles currently drive less than 1% of the distance travelled by vehicles on roads in Great Britain yet account for 19% of deaths and 23% of serious injuries. We hope that by spurring the development of new active safety methods for motorcycles, and safer methods for motion control of autonomous vehicles in general, some of these casualties may be avoided in the future.
I am delighted that this new investigator award was selected to be funded by EPSRC. I hope that over its three-year duration, we can produce algorithms and valuable software to mobile robotics and autonomous vehicle researchers in both academia and industry while continuing to push the boundaries of motorcycle active safety technology with our partners Dynamotion and the University of Padova.