
Aerospace
Decision Making Information in a Complex Autonomous System
Research into the System Elements needed to guarantee the Reliability, Availability and Integrity of Decision Making Information in a Complex Autonomous System
Summary
The current air traffic management systems are centred around piloted aircraft, in which all the main decisions are made by humans. In the world of autonomous vehicles, there will be a driving need for decisions to be made by the system rather than by humans. The system will have to decide on courses of action that will have highly safety critical consequences. One way to ensure that these decisions are robust is to guarantee that the information being used for the decision is valid and of very high integrity. To meet regulatory requirements there will still need to be some form of human involvement, or back up, and the interface between computer and human will be very important.
Aims & Objectives
The Aim of this research is to examine all the issues associated with guaranteeing that information on which decisions will be made is valid and of very high integrity. This will mean achieving the following objectives:
- Looking at all data sources on the vehicle and external to it, and determining the best way to fuse this information for decision-making purposes,
- Working out where the best place to do the decision making processing is, (i.e. on-board or remotely),
- Examining how to share the decision-making between human and system, and ensuring that the human interface is intuitive and robust.
Research being undertaken
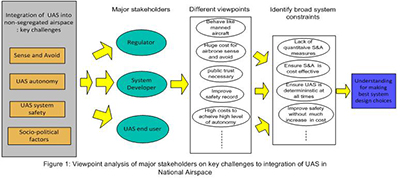
- A systems approach has been applied to understand the problem of Unmanned Aircraft System (UAS) integration into the national airspace holistically.
- Determine system requirements for a sense and avoid system for UAS and also outline system architecture for the system within the overall national airspace system of which it is a part.
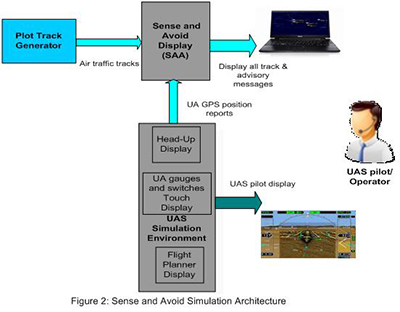
- Develop a prototype sense and Avoid Display system for providing self-separation services to UAS pilot.
- Integration of the prototype display with a UAS synthetic environment to provide a pre-operational demonstration system for assessing the decision making and human factors aspects of the display on UAS pilot.

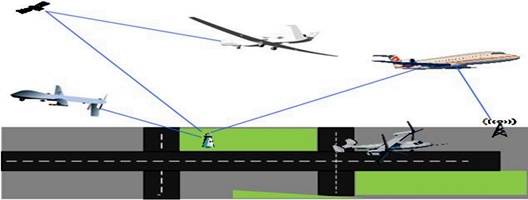
UAV Control Station
Results
Work in progress
Conclusions
Work in progress
Expected Impact
- The proof of concept system would be used as a demonstration platform to show to the various stakeholders involved in the research project.
- The proof of concept could also be used as a platform to test and verify the impact of changes in display function on the human factors aspects and also implement other separation mechanism schemes for UAS operations.
Publications
Ramalingam, K, Kalawsky, R.S., Noonan, C. “Integration of Unmanned Aircraft System (UAS) in non-segregated airspace: A complex system of systems problem”. IEEE International Systems Conference, Proceedings 448-455, (2011).
Synthetic Weather For A Simulation Environment
Download a pdf containing this information