Reach
The SAMMIE system can evaluate reach to any interaction point. Reach can be assessed simply by positioning the arms or legs so that the hands or feet either contact, or fail to contact, a specified control point in space. Alternatively, the reach point can be specified and the human model will automatically display a geometrically feasible reach posture if possible. If the reach attempt fails, the system provides the out of reach distance.
Functional reach is also directly linked to grip or hand posture. In a similar way to full body postures, SAMMIE provides 16 joints and 19 straight rigid links structured to form a realistic hand form. In addition, a library of standard grip types e.g. pinch grip, palm grip, index finger point etc. are available to avoid time consuming and complex hand manipulations. For each grip the reach point is varied, thus for index finger point the reach point is the tip of the index finger. This could be used to evaluate reach to a push button where the tip of the finger needs to interact with the centre of the button surface. For a palm grip the reach point is in the centre of the gripped volume near the palm. Thus a reach evaluation to a lever, or steering wheel, will attempt to place hand such that the cylindrical form is enclosed by the reaching hand.
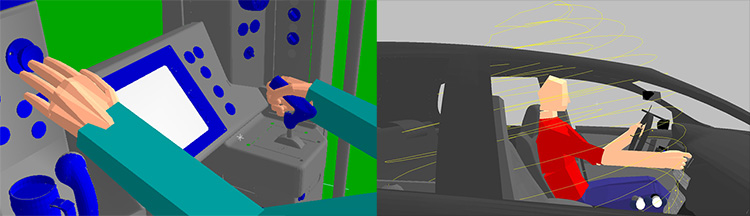
Direct reach with definable grip postures and yellow reach contours defining the reachable volume of the driver's right arm.
There are two other automated methods to define reach: reach areas and reach volumes, collectively referred to as reach contours. Reach areas are overlaid on any surface of a design. The 2D space enclosed within the reach area is reachable by that human model, for the current posture, with the given grip type. Reach volumes provide a similar assessment to areas by combining a set of reach areas to form a reach volume. Reach Areas and Volumes provide a quick visual assessment of reach locations and they can be hidden, coloured and moved along with the motion of the selected limb.